
Einstein Summation Convention, The Kronecker, and Levi-Civita Symbols

Einstein in 1916 developed the following notation scheme when manipulating expressions involving vectors, matrices, or tensors in general.
The rules of summation convention are:
-
Each index can appear at most twice in any term.
-
Repeated indices are implicitly summed over.
-
Each term must contain identical non-repeated indices.
For example:

is a valid expression but

is not a valid expression in summation convention, since the index j appears three times in the first term.
Einstein summation implies the following;
For any vector quantity, V,

And the dot product of two vector quantity V and F is,

In a Cartesian basis, the gradient of a scalar (φ) and the divergence of a vector D can be variously written as,

We can also easily get the matrix multiplication using the Einstein summation convection;
If an N × N matrix C is the product of an N × M matrix A and an M × N matrix B

The Kronecker delta symbol δij is defined as,

And Levi-Civita` permutation symbol εijk is,
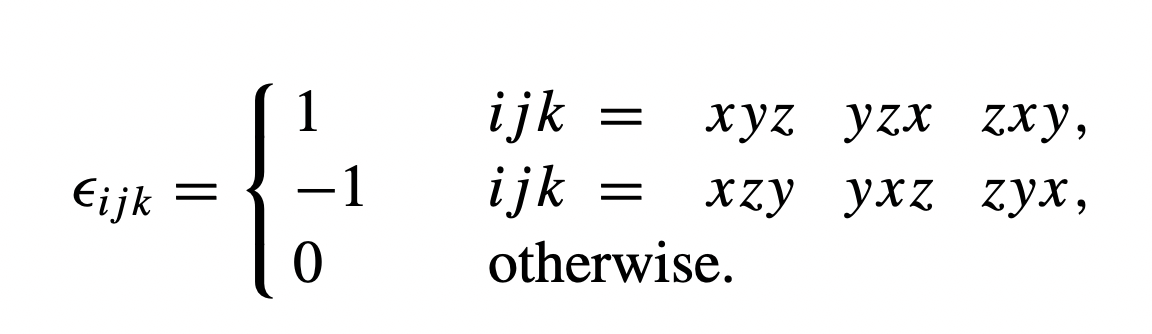
Notice that ‘1’ is for cyclic permutation of x, y, and z and ‘-1’ is for anti-cyclic permutation of x, y, and z. Zero is when, either i=j, j=k, or k=i.
That is, if we define x=1, y=2 and z=3 then Levi- Civita symbol holds following,

All other components are zero.
Using εijk we can write index expressions for the cross product and curl. The ith component of the cross product is given by,
Now, [U✕V]1 = 𝜺1jkUjVk = 𝜺123U2V3 + 𝜺132U3V2 + all other terms zero
This gives [U✕V]1 = U2V3 - U3V2
Similarly,
[U✕V]2 = U3V1 - U1V3
And [U✕V]3 = U1V2 - U2V1
Some other standard relations defined are,

𝝏krj means 𝝏k/rj
Additionally, 𝜺ijk𝜺ist = 𝜹js𝜹kt - 𝜹jt𝜹ks
𝜺ijk = - 𝜺jik
▽ = 𝝏i and for any vector A, ▽A = 𝝏iAi.